- Downloads
- ELVjournal
Artikel pro Seite:
Artikel-Nr. 254713
Mehr Wissen in Elektronik: Bausätze - ELV Smart Home Bodenfeuchtesensor Interface - Smarte Gartenbewässerung - EXSB-Midi Experimentierboard mit autarker Spannungsversorgung
Sofort zum Download verfügbar
Artikel pro Seite:
Weitere Beiträge
Artikel-Nr. 254147
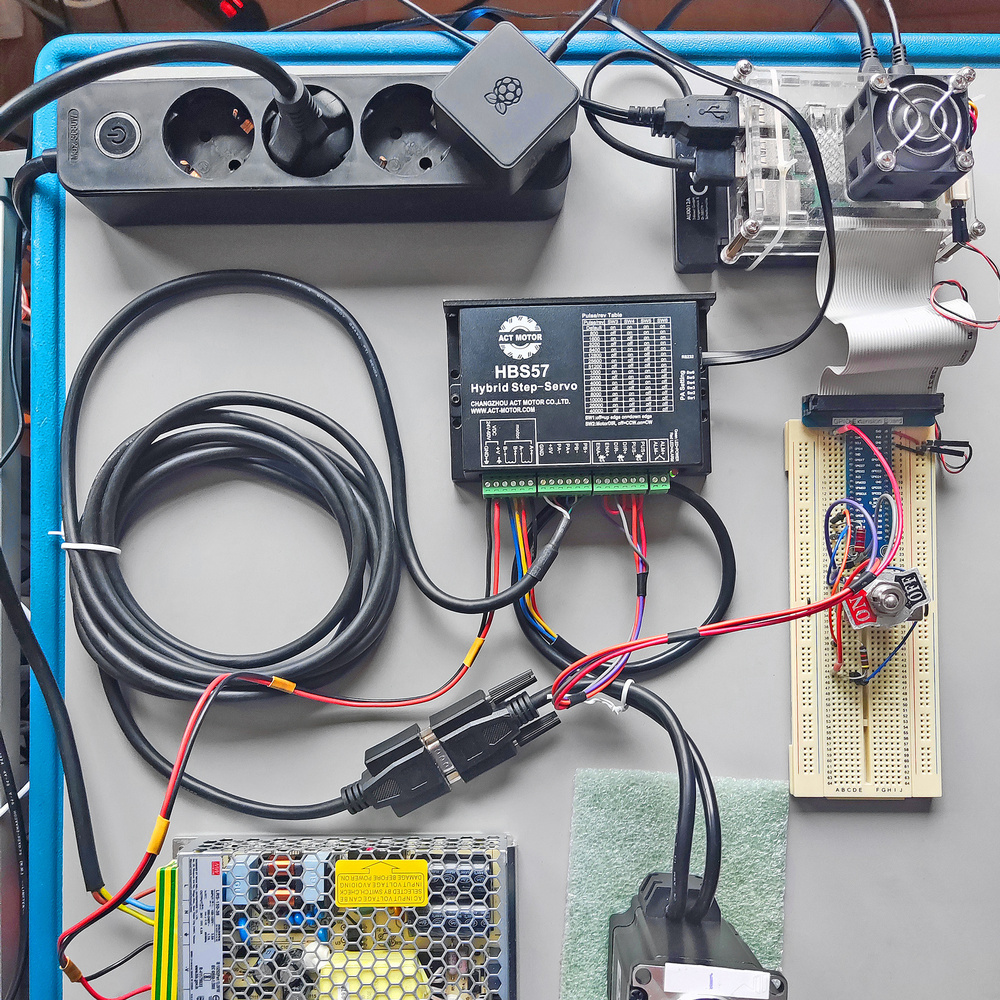
Nachdem im Grundlagenteil dieser Artikelserie die verschiedenen Arten von Schrittmotoren, ihr Aufbau, die Art der Wicklungsbestromung sowie ihre Vor- und Nachteile theoretisch erläutert wurden, geht es in diesem Artikel um den praktischen Betrieb eines Steppermotors am Raspberry Pi.
Sofort zum Download verfügbar
Artikel-Nr. 254090
Schrittmotoren (engl. stepper motors) dienen wie jede andere Art von elektrischen Motoren der Umwandlung elektrischer Energie in mechanische Energie. Schrittmotoren bestehen aus einem feststehenden Stator und einem sich in Winkelinkrementen drehenden Rotor. Im Gegensatz zu herkömmlichen Elektromotoren rotiert der Rotor nicht kontinuierlich, sondern „gequantelt“, also in mehr oder weniger großen Drehschritten. So erreicht er auch ohne Regelungsmechanismen eine hohe Positioniergenauigkeit. Damit ist das Schrittmotorprinzip ideal geeignet für Anwendungen in der Robotik, in 3D-Druckern, Floppy-Disk- und Festplattenlaufwerken und für Präzisionsanwendungen aller Art und Größenordnungen.
Sofort zum Download verfügbar
Artikel-Nr. 254209
In diesem Teil der Folge über Schrittmotoren wollen wir uns den bipolar angesteuerten Typen im NEMA-Format zuwenden. Der Schrittmotor wird mithilfe eines Raspberry Pi angesteuert und nach einigen Vorbereitungen kann der Motor mithilfe eines Python-Sketchs in Betrieb genommen werden.
Sofort zum Download verfügbar
Weitere Beiträge
Artikel-Nr. 254147
Nachdem im Grundlagenteil dieser Artikelserie die verschiedenen Arten von Schrittmotoren, ihr Aufbau, die Art der Wicklungsbestromung sowie ihre Vor- und Nachteile theoretisch erläutert wurden, geht es in diesem Artikel um den praktischen Betrieb eines Steppermotors am Raspberry Pi.
Sofort zum Download verfügbar
Artikel-Nr. 254090
Schrittmotoren (engl. stepper motors) dienen wie jede andere Art von elektrischen Motoren der Umwandlung elektrischer Energie in mechanische Energie. Schrittmotoren bestehen aus einem feststehenden Stator und einem sich in Winkelinkrementen drehenden Rotor. Im Gegensatz zu herkömmlichen Elektromotoren rotiert der Rotor nicht kontinuierlich, sondern „gequantelt“, also in mehr oder weniger großen Drehschritten. So erreicht er auch ohne Regelungsmechanismen eine hohe Positioniergenauigkeit. Damit ist das Schrittmotorprinzip ideal geeignet für Anwendungen in der Robotik, in 3D-Druckern, Floppy-Disk- und Festplattenlaufwerken und für Präzisionsanwendungen aller Art und Größenordnungen.
Sofort zum Download verfügbar
Artikel-Nr. 254209
In diesem Teil der Folge über Schrittmotoren wollen wir uns den bipolar angesteuerten Typen im NEMA-Format zuwenden. Der Schrittmotor wird mithilfe eines Raspberry Pi angesteuert und nach einigen Vorbereitungen kann der Motor mithilfe eines Python-Sketchs in Betrieb genommen werden.
Sofort zum Download verfügbar
Jetzt zum ELV-Newsletter anmelden.
Ja, ich möchte ab sofort über interessante Angebote informiert werden. Zum Datenschutz